THE PID CONTROLLER:
The term PID is an acronym that
stands for Proportional Integral Derivative. A PID controller is part of a
feedback system. A PID system uses Proportional, Integral, and Derivative drive
elements to control a process. Some of you already know what P, I, and D stand
for. Don’t worry if you don’t; we will soon cover these terms with
easy-to-understand examples.
Why Do I Need PID Control?
You need the PID because there are some things that are difficult to
control using standard methods. Let me illustrate with an example. My first
experience with control systems was a failure. My goal was to regulate the
output of a power supply using a PIC microcontroller. The PIC read the output
voltage with an AD converter and adjusted a PWM to regulate the output. The
control strategy was very simple: If the voltage was below a set-point, turn on
the PWM. If the measured voltage was above the set-point, then turn off the
PWM. The PIC power supply almost worked. It did produce the DC output voltage
that I wanted. Unfortunately, it also has a significant AC ripple riding on the
DC signal.
What Is Integral?
Integral is shorthand for integration. You can think of
this as accumulation (adding) of a quantity over time. For example, you are now
integrating this information into your store of knowledge. Your store of
knowledge has components of both time and knowledge. Obviously, we all started
as babies with virtually no knowledge. Over time, we have integrated knowledge
into our brains.In our PID controller, we are integrating voltage as time progresses. A schematic of an integrator circuit is shown in Figure:

What Is Derivative?
The derivative is a measurement of the rate of change.
The ideal differentiator is shown in Figure. This circuit looks similar to the high pass
filters you have seen in other schematics. Low frequencies are attenuated,
while high frequencies are allowed to pass. The mathematics that describes the
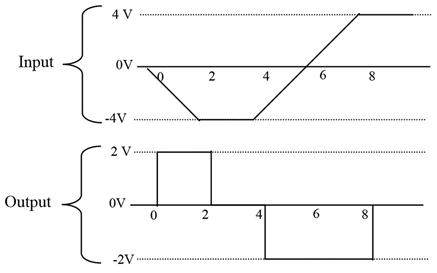
differentiator is:Vout = -RC * (rate of change)
Rate of change is equivalent to measuring the slope of a line. Slope is a measure of the change in voltage divided by the change in time. In mathematical terms, this is referred to as a delta voltage over delta time or simply dv/dt. If we apply a ramp to the differentiator, we get a steady DC output voltage. Figureillustrates the input/output relationship of a differentiator.
Servo Motor System:
Now that we are familiar with the P, I, and D terms,
let’s examine how they are combined to form a complete system. We will be using
the PID controller to control a DC servo motor. I used a Hitec brand servo
motor typically found in R/C model cars and airplanes. This servo is
inexpensive and readily available. You can also purchase replacement gears —
more of that in the next installment.
PID Block Diagram:
A
block diagram showing the functional relationships of the PID controller is
shown in figure.

CIRCUIT DESCRIPTION:
This schematic is an adaptation of the PID controller presented by Professor Jacob in his book, Industrial Control Electronics. This type of system has the advantage of easy tuning. This circuit is also simple and easy to construct.
The schematic has the same physical layout as the block diagram. Op-amp U1 is used as the summing junction for the set-point and measured motor position. The individual P, I, and D functions are implemented by U2, U3, and U4, respectively. Finally, op-amp U5 sums the individual PID terms. The P and I terms are inverted, while the D term is not. Darlington transistors have been added to U5 to boost the current to a level sufficient to drive the motor.
The individual P, I, and D components appear just as they were presented earlier in this article. Each of the terms has a variable resistor to adjust its gains. The adjustment (tuning) of this circuit is the topic for the next installment.


No comments:
Post a Comment